4小时前
河南省|郑州市 |结构工程师
找Ta做项目 收藏设计师
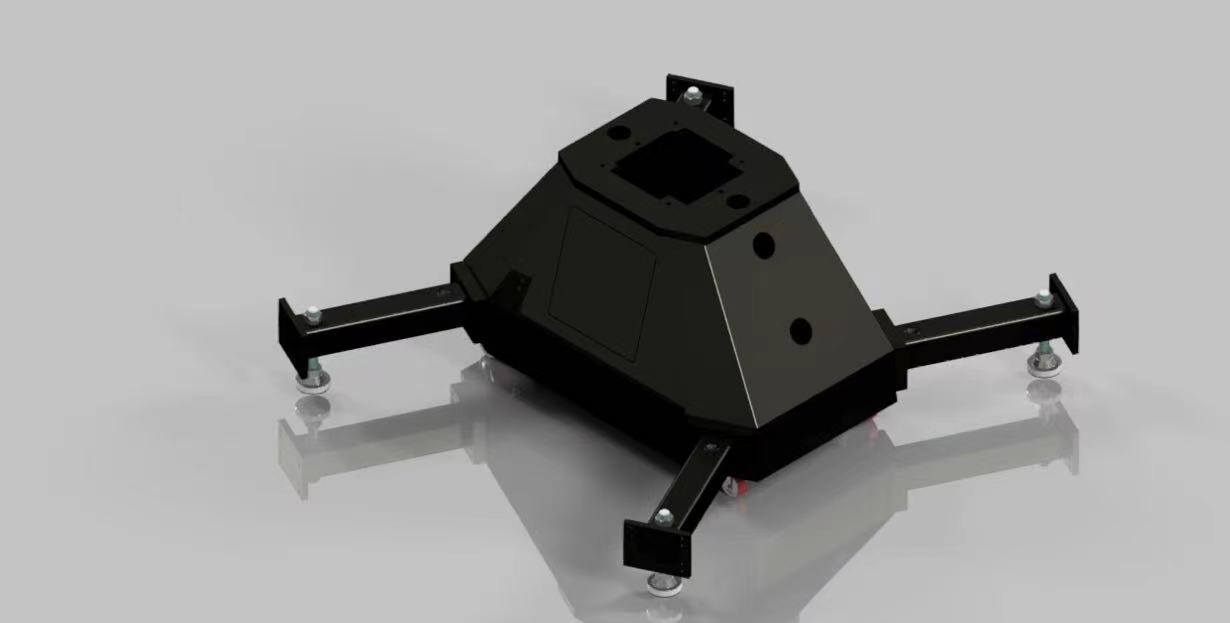
可移动的六轴机器人底座,该项目旨在开发一种具有灵活移动能力,且可以上轨道的六轴机器人底座,提高机械臂的作业范围和移动作业点的效率。
效果图
可移动底座
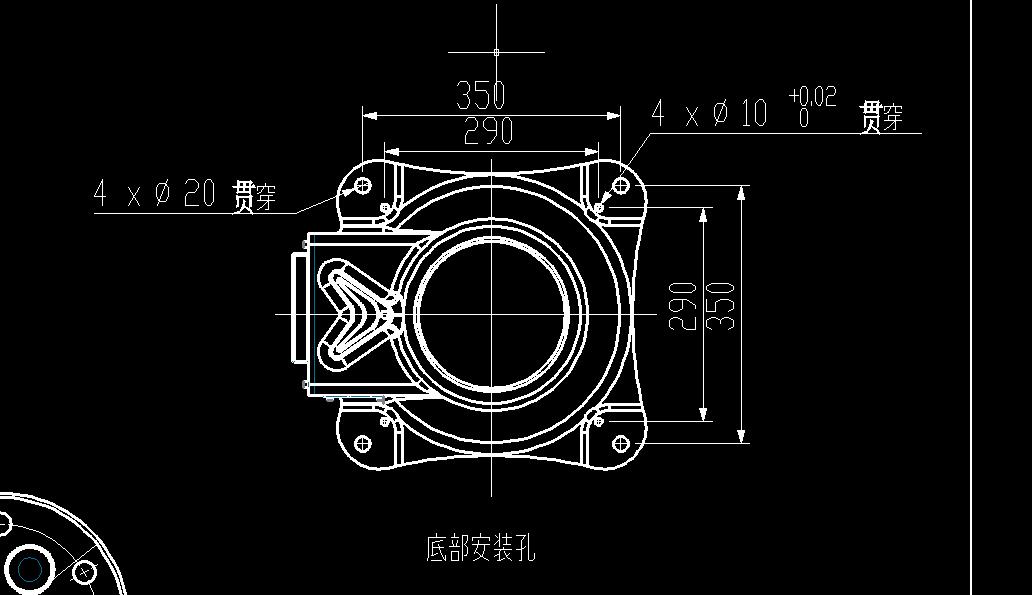
二维生产图
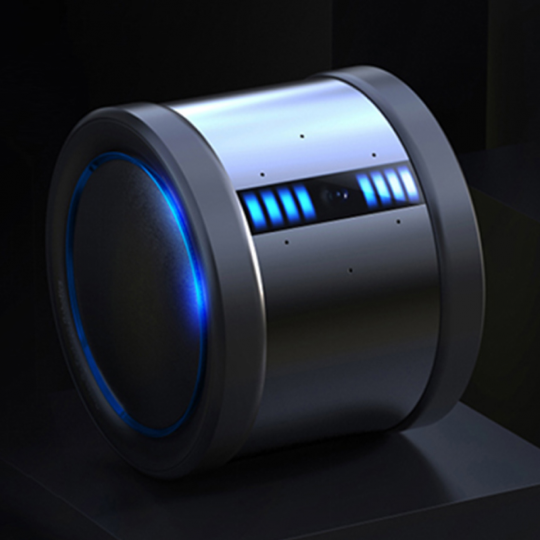
机械臂
可移动的六轴机器人底座
79F97AA73 刚刚
辅助行走的老人智能搀扶机器人设计
白狐工业设计 13分钟前
智位蚂蚁机器人
李裕康
机房巡检机器人设计
石家庄白狐设计 一小时内
智能儿童机器人
贝塞尔 一小时内
外骨骼机器人
周青 1小时前
螺趣科技
牧马人 1小时前
【机器人】百度机器人
南京科教益智设计 1小时前